Whatsapp Us Today! Join Now
An analogy for the difference between squarewave and sinewave is like pushing a bowling ball down the street. Sinewave uses a smooth constant push the whole way, while squarewave attempts to simulate the same forces but uses constant jabbing/nudging instead of an even “push”.
The loss of energy to sound (harmonic losses) in square wave controllers which is caused by the transitions between each of the 120 deg phase differences makes your regular cheap square wave controller less efficient.
Sinewave (or Field Oriented Control FOC) controllers are generally more expensive because it requires alot more computational power to output a sine waveform to drive the motor efficiently.

Square wave on the other hand is simple in its computation requiring just the 3 phase on/off signal to drive the motor in a time sequence.
Here is how it works for a square wave controlled motor as it moves through the revs:
Here are the pros and cons of a sinewave vs square wave controller:
| Sinewave FOC Controller | Squarewave Controller | |
| Pros | 1. Lower noise and heat generated 2. Smoother fine speed control. Allows riders to maneuver turns without braking too hard 3. More efficient at lower speeds going up slopes 4. Smoother acceleration |
1. Cheaper due to less computational power needed 2. No need to do motor tuning and matching 3. Produces more punch or torque during acceleration 4. Less efficient at normal speeds due to noise and heat |
| Cons | 1. Higher price due to more sophisticated motor control 2. Inefficient at high speeds 3. Motors and controller needs to be paired and tuned |
1. Noisier motor with more heat generated 2. Non-linear punchy acceleration 3. Voltage sag at high speed or acceleration may result in overheating or shutdown |
So for workhorse controllers that require high efficiency in normal operations like cruising or slope climbing, sinewave FOC is the better option as they will not require such high power consumption.
| Voltage | 60-72V |
| Current | 50A / 70A peak |
| Accessories |
TFT LCD (not included); wire harness (not included); throttle (not included) |
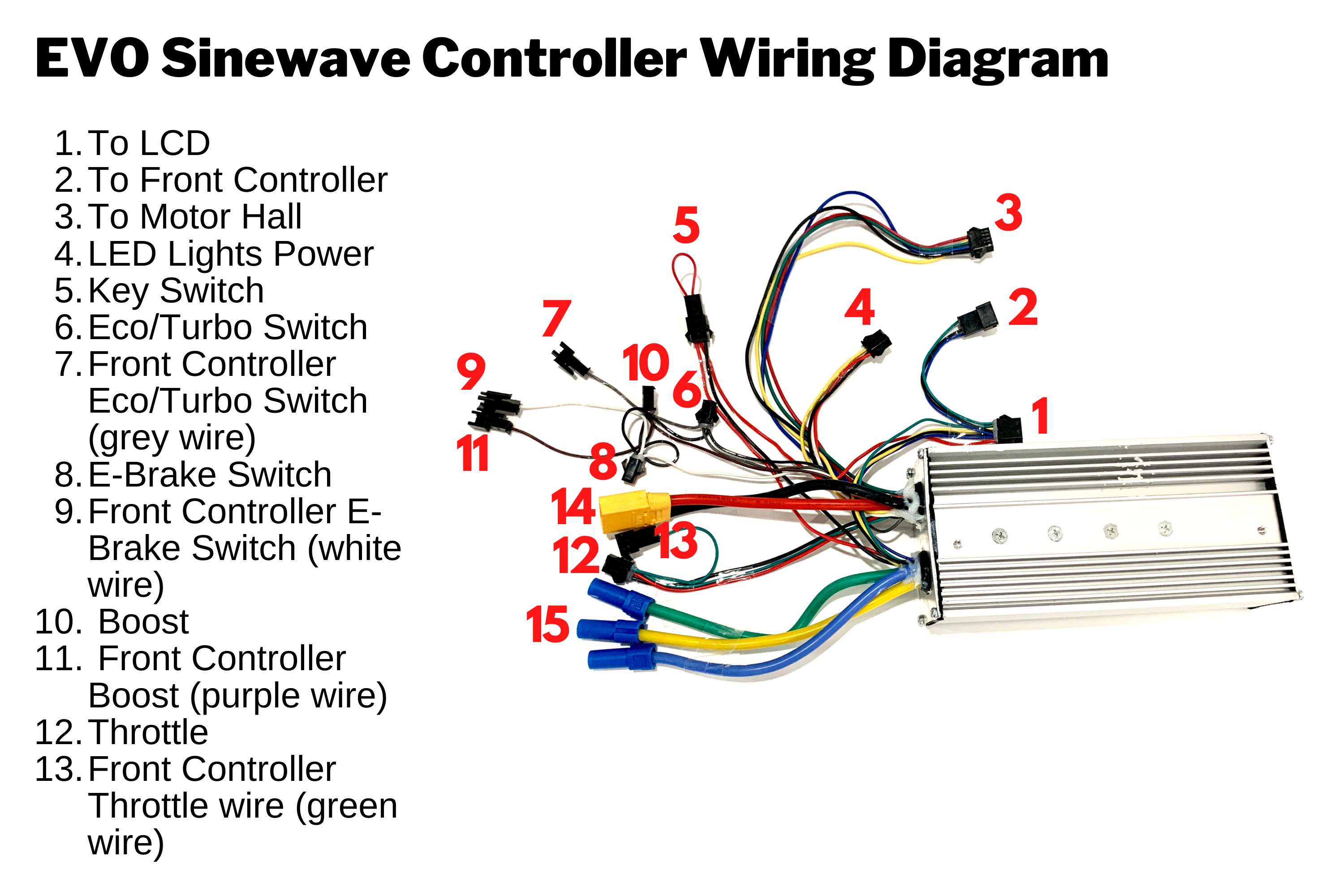
| Wiring Diagram for EVO motor | EVO Wiring diagram |
| Wiring Diagram for Limited Setup | Limited Wiring diagram |
Here is an actual demonstration of 2 equivalent electric scooter setups. 60V 100A output with a 60V 21Ah battery. The only difference is that one is equipped with a sinewave FOC controller and the other with a square wave punchy controller.
This is only a drag race test to see which controller would come out on top over 30m. You would expect the square wave punchy controller to be much faster off the blocks every time which is the case but the FOC controller always catches up within a short distance due to its efficiency.

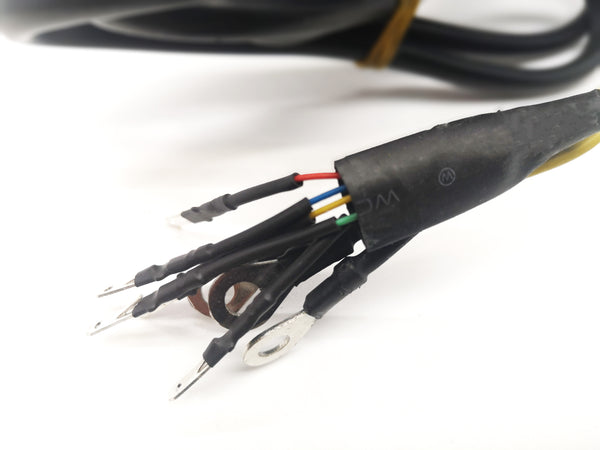
If you have any issues with the controller to motor connection, do follow these steps to configure your motor to your high speed controller especially if you experience the motor jerkiness or motor not moving.





All-in-1 Safety Handlebar Bundle for E-Bikes and E-Scooters Safety is always our top priority hence we have...





12 inch High Speed Hub Motor for Fiido





ZERO Battery Pouch with Battery Waterproof hardcase pouch for e-scooters. You can put your spare charger,...






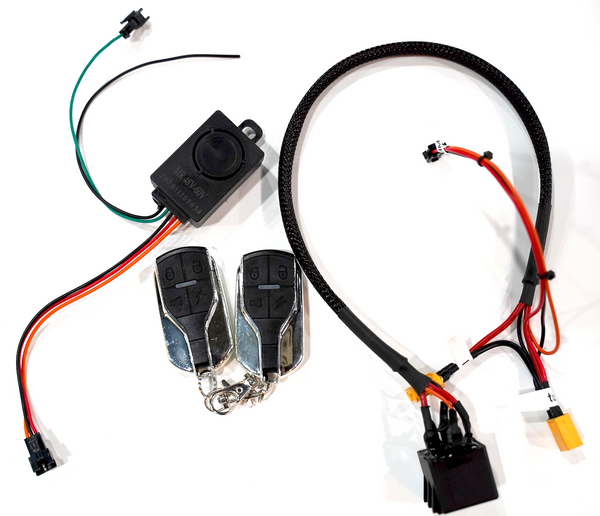
E-Scooter E-Bike Immobilizer Alarm with Remote On/Off This immobilizer security system comes with an alarm and...





DNM Air Shock Suspension The DNM AOY-36RC XC/MTB/Trail/Cyclocross Bike Rear Shock has been fitted with a...







All-Terrain (Urban Off-Road) Tires For Zero 10X/11X Do you find your tires puncturing too often on...











ZERO Adjustable Seat Post for all models 8, 9, 10, 10X Full set ZERO e-scooter seat...

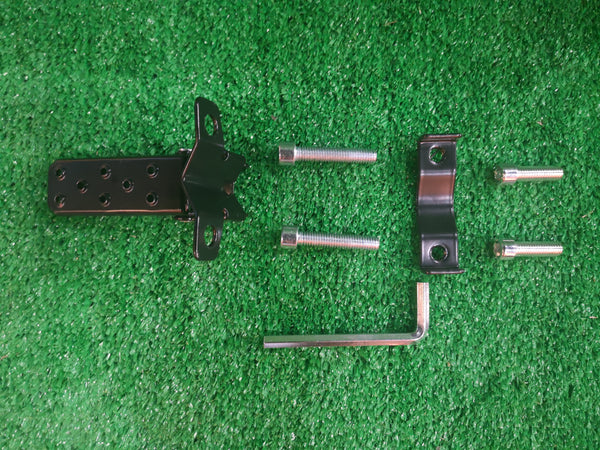
Mounting Rod for Rear Bracket Aluminium rod with bracket extender.





Ergotec 6 Stem Adapter 31.8mm Want to upgrade your handlebar for overall lighter weight, longer span...






Foldable Foot Pegs Footrests for Fiido Ebike





Aluminium Universal GUB Phone Holder for E-Scooters and E-Bikes The GUB Phone Holder is the perfect...
All orders are shipped in 1-2 business days and arrives within 1 week.
Free Shipping on local orders
Experienced Before and After Sales Support